자율주행 - 5G·정밀측위 통합 통신 솔루션 | LG U+
| 항목 | 내용 |
자율주행 - 5G·정밀측위 통합 통신 솔루션 | LG U+
1. Source Identity
| 항목 | 내용 |
|---|---|
| 발행기관 | LG U+ |
| 저자·발표자 | unknown |
| 원문 유형 | official_page |
| 발행일·수정일 | unknown / unknown |
| 수집일 | 2026-06-21 |
| 원문 언어 | en |
| 원문 URL | https://www.lguplus.com/biz/all/5g/smart-mobility/autonomous-driving/B000000127 |
| 최종 도달 URL | https://www.lguplus.com/biz/all/5g/smart-mobility/autonomous-driving/B000000127 |
| 수집 범위 | partial |
| 라이선스 | unknown |
2. Evidence Abstract
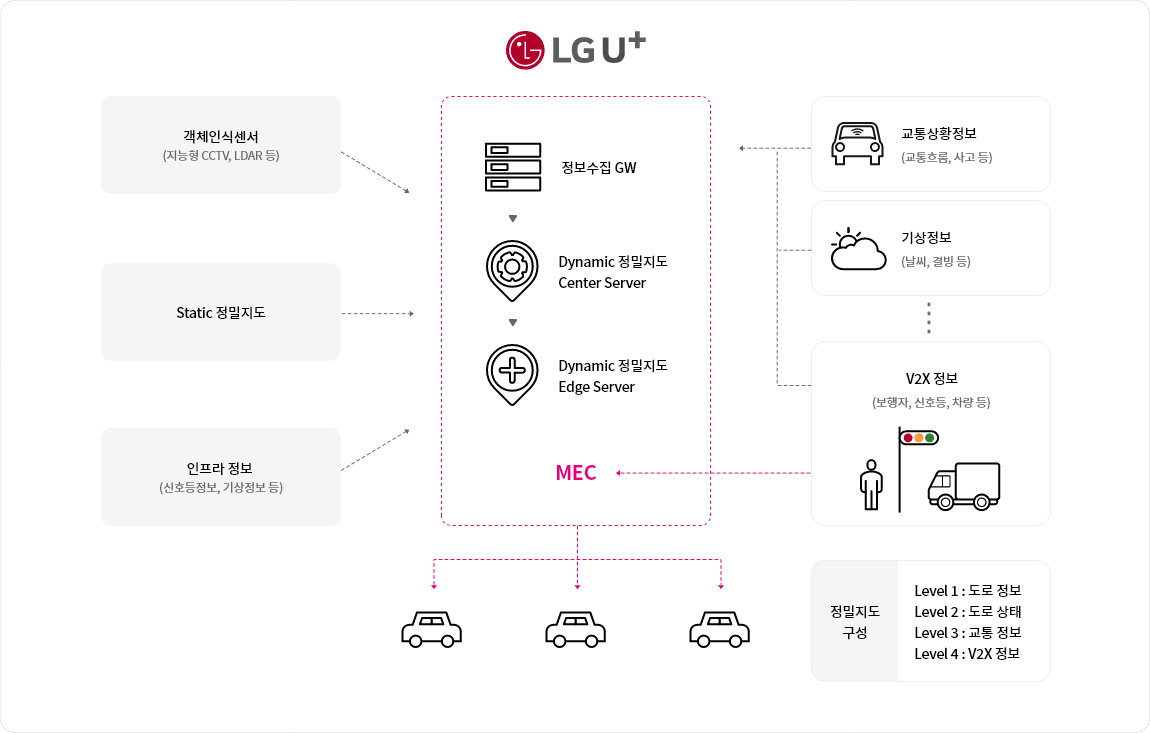
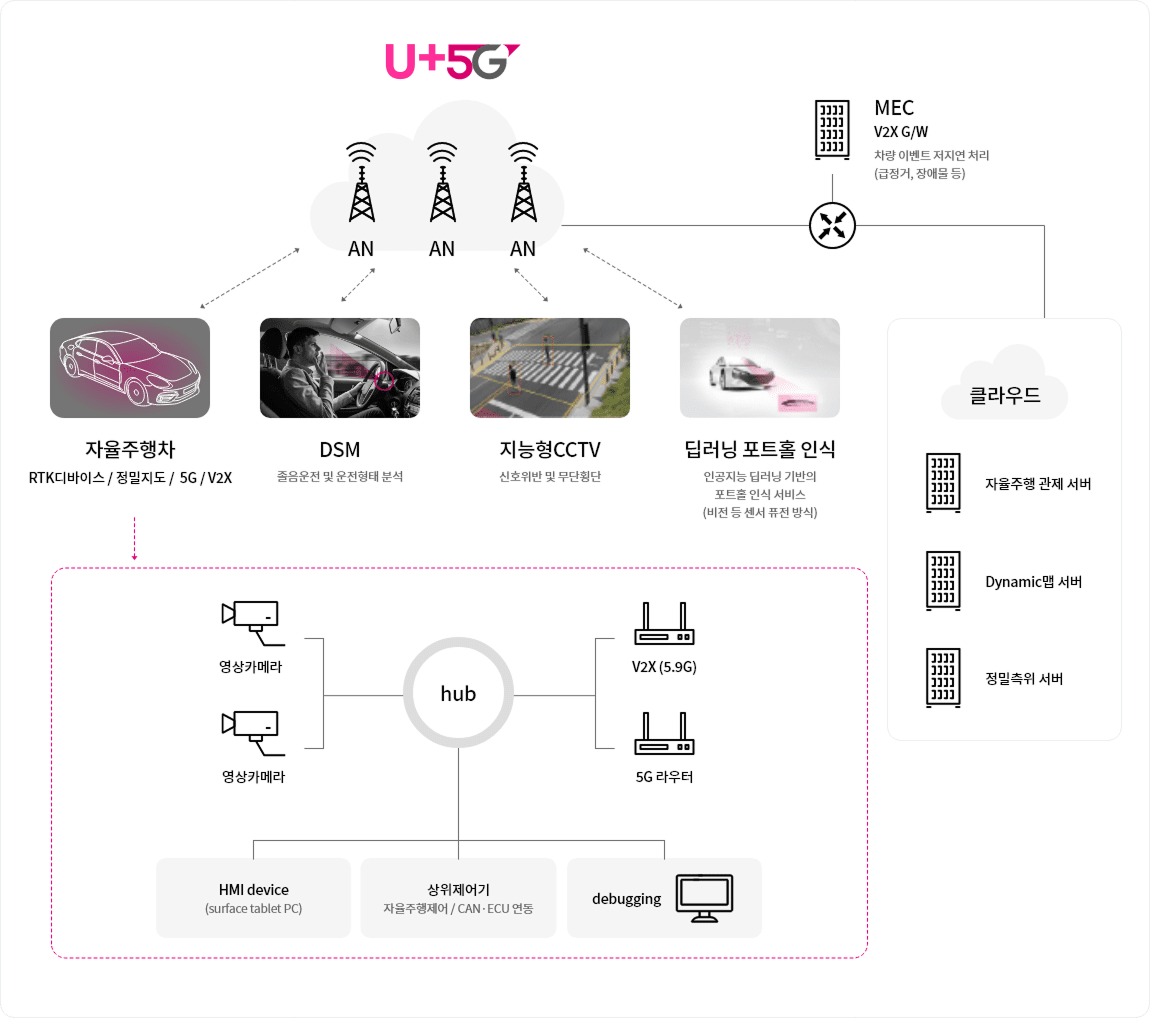
5G와 V2X 기반의 자율주행 모빌리티 서비스. U+ Dynamic 정밀지도 플랫폼은 센서 사각지대 보행자·차량 정보, 교통 정체, 사고, 기상 정보, 신호현시 정보를 제공. 자율주행 관제는 실시간 위치·운행상태 모니터링, V2X, MEC, 정밀측위, Dynamic Map 서버를 연결한다.
3. Atomic Claims
| claim_id | 원문 위치 | 주체 | 주장·사실 | 수치·기간 | 근거 유형 | 확실성 |
|---|---|---|---|---|---|---|
src_lguplus_autonomous_driving_c01 |
Source Notes / 원문 재확인 필요 | LG U+ | 5G와 V2X 기반의 자율주행 모빌리티 서비스. | 5 unspecified | statement | high |
src_lguplus_autonomous_driving_c02 |
Source Notes / 원문 재확인 필요 | LG U+ | U+ Dynamic 정밀지도 플랫폼은 센서 사각지대 보행자·차량 정보, 교통 정체, 사고, 기상 정보, 신호현시 정보를 제공. | - | statement | high |
src_lguplus_autonomous_driving_c03 |
Source Notes / 원문 재확인 필요 | LG U+ | 자율주행 관제는 실시간 위치·운행상태 모니터링, V2X, MEC, 정밀측위, Dynamic Map 서버를 연결한다. | - | statement | high |
4. Entities and Relationships
| 주체 | 관계 | 대상 | 원문 근거 | 유효시점 |
|---|---|---|---|---|
| 명시적 관계 추출 없음 | - | - | 원문 구조화 재검토 필요 | - |
5. Numbers, Dates, and Commitments
| 항목 | 값 | 단위 | 기준시점 | 성격 | claim_id |
|---|---|---|---|---|---|
| 5G와 V2X 기반의 자율주행 모빌리티 서비스. | 5 | unspecified | unknown | reported | src_lguplus_autonomous_driving_c01 |
6. Definitions and Terminology
| 원문 용어 | 한국어 표기 | 원문에서의 의미 | Wiki Concept 후보 |
|---|---|---|---|
adas |
ADAS | 이 Source가 관련 근거로 사용되는 개념 | ADAS |
ai cabin |
AI Cabin | 이 Source가 관련 근거로 사용되는 개념 | AI Cabin |
automotive display |
Automotive Display | 이 Source가 관련 근거로 사용되는 개념 | Automotive Display |
autonomous driving |
Autonomous Driving | 이 Source가 관련 근거로 사용되는 개념 | Autonomous Driving |
battery software |
Battery Software | 이 Source가 관련 근거로 사용되는 개념 | Battery Software |
bms bmts |
BMS / BMTS | 이 Source가 관련 근거로 사용되는 개념 | BMS / BMTS |
in cabin sensing |
In-Cabin Sensing | 이 Source가 관련 근거로 사용되는 개념 | In-Cabin Sensing |
in vehicle ai |
In-Vehicle AI | 이 Source가 관련 근거로 사용되는 개념 | In-Vehicle AI |
on device ai |
On-Device AI | 이 Source가 관련 근거로 사용되는 개념 | On-Device AI |
v2x |
V2X | 이 Source가 관련 근거로 사용되는 개념 | V2X |
7. Figures, Tables, and Images
| asset_id | 유형 | 원문 위치 | 설명·읽을 수 있는 사실 | original_url | local_path | status |
|---|---|---|---|---|---|---|
| lguplus_autonomous_driving_main | image | 원문 또는 Source Notes | LG U+ 자율주행 서비스 대표 이미지. 원본 페이지에서 직접 이미지 URL 확보. | https://www.lguplus.com/static/pc-contents/images/uhdc/entp/pr/20230726-111732-657-zkOTPTlY.jpg | assets/images/lguplus_autonomous_driving_main.jpg | downloaded |
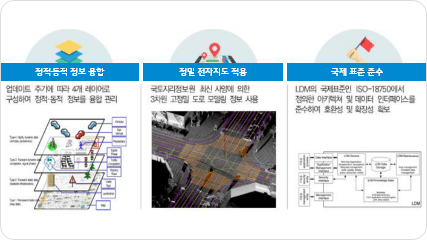
| lguplus_dynamic_map_features | image | 원문 또는 Source Notes | U+ Dynamic 정밀지도 플랫폼. 정밀지도 융합, 정밀 전자지도 적용, 국제 표준 준수를 설명. | https://image.lguplus.com/static/pc-contents/images/fcmm/cnts/imge/20230724-045046-845-7m6JNc0Y.png | assets/images/lguplus_dynamic_map_features.png | downloaded |
| lguplus_control_center | image | 원문 또는 Source Notes | 자율주행 운영 관제센터 이미지. 실시간 위치·운행상태 모니터링과 운영관리 역할을 설명. | https://image.lguplus.com/static/pc-contents/images/fcmm/cnts/imge/20230724-045059-757-lKafcyHG.png | assets/images/lguplus_control_center.png | downloaded |
| lguplus_dynamic_map_architecture | image | 원문 또는 Source Notes | U+ Dynamic 정밀지도 플랫폼 구성도. 객체인식센서, Static 정밀지도, 인프라 정보, V2X 정보를 연결. | https://image.lguplus.com/static/pc-contents/images/fcmm/cnts/imge/20230724-045723-227-BDbJxueg.png | assets/images/lguplus_dynamic_map_architecture.png | downloaded |
| lguplus_autonomous_control_architecture | image | 원문 또는 Source Notes | U+ 자율주행 관제 구성도. 5G, MEC V2X Gateway, 관제 서버, Dynamic Map 서버, 정밀측위 서버를 연결. | https://image.lguplus.com/static/pc-contents/images/fcmm/cnts/imge/20251231-111108-771-geJgzr8n.png | assets/images/lguplus_autonomous_control_architecture.png | downloaded |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
8. Source Limitations
- Source Card의 한국어 기록은 원문을 대체하지 않으며, 전략적 해석은 Docs와 Topics에서 관리한다.
- 기존 Source Notes에서 승격한 claim은 원문 section·page 위치를 재확인해야 한다.
9. Reliability Assessment
| 평가 항목 | 판단 | 이유 |
|---|---|---|
| 출처 직접성 | high |
LG U+의 자료 유형과 발행 주체를 기준으로 평가 |
| 사실 검증성 | medium |
기존 Source Notes에 3개 핵심 사실이 구조화되어 있음 |
| 최신성 | dated_or_unknown |
발행일 unknown 기준 |
| 이해관계 | high |
공식 발표자료는 직접성이 높지만 발행 주체의 이해관계를 포함함 |
| 종합 등급 | B |
원문 직접성, 접근성, 기존 facts의 구체성을 종합 평가 |
10. Used In
| Entity | 사용한 claim_id | 사용 방식 |
|---|---|---|
| AI Mobility / SDV·AIDV | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
전략·시장 근거 |
| ADAS | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| AI Cabin | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| Automotive Display | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| Autonomous Driving | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| Battery Software | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| BMS / BMTS | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| In-Cabin Sensing | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| In-Vehicle AI | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| On-Device AI | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| V2X | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
개념 정의·맥락 근거 |
| LG U+ | src_lguplus_autonomous_driving_c01, src_lguplus_autonomous_driving_c02, src_lguplus_autonomous_driving_c03 |
기업 역할·연결 근거 |
11. Update Hooks
- 변경 감지 기준: 원문 수정일, 핵심 수치, 제품 버전, 파트너, 투자·생산·구축 목표 변경
- 영향받는 Entity: AI Mobility / SDV·AIDV, ADAS, AI Cabin, Automotive Display, Autonomous Driving, Battery Software, BMS / BMTS, In-Cabin Sensing, In-Vehicle AI, On-Device AI, V2X, LG U+
- 재검토 조건: 후속 실적 발표, 목표 시점 도달, 계약·제품·정책의 새 버전 공개
- 마지막 검토일: 2026-06-21
Appendix A. Permitted Evidence Excerpts
저작권과 검증 목적에 필요한 짧은 원문 발췌는 원문 위치 확인 후 추가한다. 현재 자동 마이그레이션에서는 전체 원문을 복제하지 않았다.
Appendix B. Ingestion Notes
- 변환 방식: 기존 Source Summary와 Key Facts를 atomic claim으로 승격
- 원문 수집 상태:
fetched - HTTP / 오류:
200/ - - Content-Type:
text/html; charset=utf-8 - Content Hash:
3ee4d507d32924ddf83d13f712e75520022c6ecf2f72d4b090715c1ffbd5e56c - 감지된 heading 수: 11
- 제외 범위: navigation, footer, 광고, cookie 문구 및 전체 원문 복제
- 후속 작업: claim별 원문 section·page 위치를 우선순위에 따라 수동 또는 정밀 파서로 보강